
Mechanical Walking Robots
mechanicaldesign101.substack.com
Mechanical Walking Robots
Design, fabrication and testing

We were back in the classroom for my Spring 2022 Mechanism Design class after on-again off-again Fall and Winter quarters. The students design their own leg mechanisms to achieve a flat-sided foot trajectory, so the walker glides without lifting its center of gravity. A digital prototype of the complete device including chassis, legs, motor, drive line and electronics is completed to verify the design and then it is constructed. The following videos show two examples.
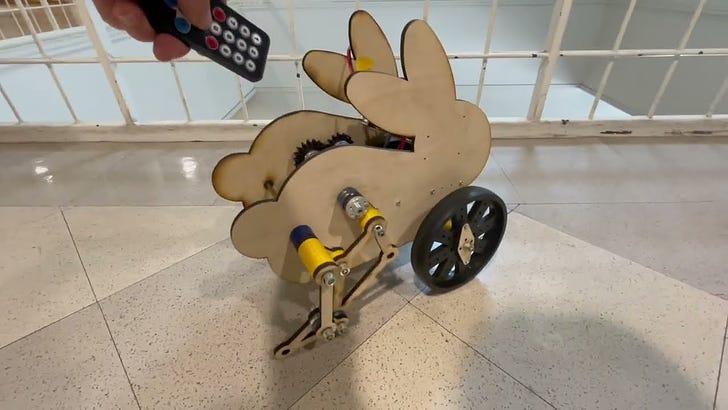
This is the work of Katlyn Chiu and Timothy Young, The bunny represents Spring,
Justin Nguyen and Marc Ono designed and built this two-legged walker. The flower pot is from the upside-down Spring, which is why the pot is inverted and the flower grows downwards.