
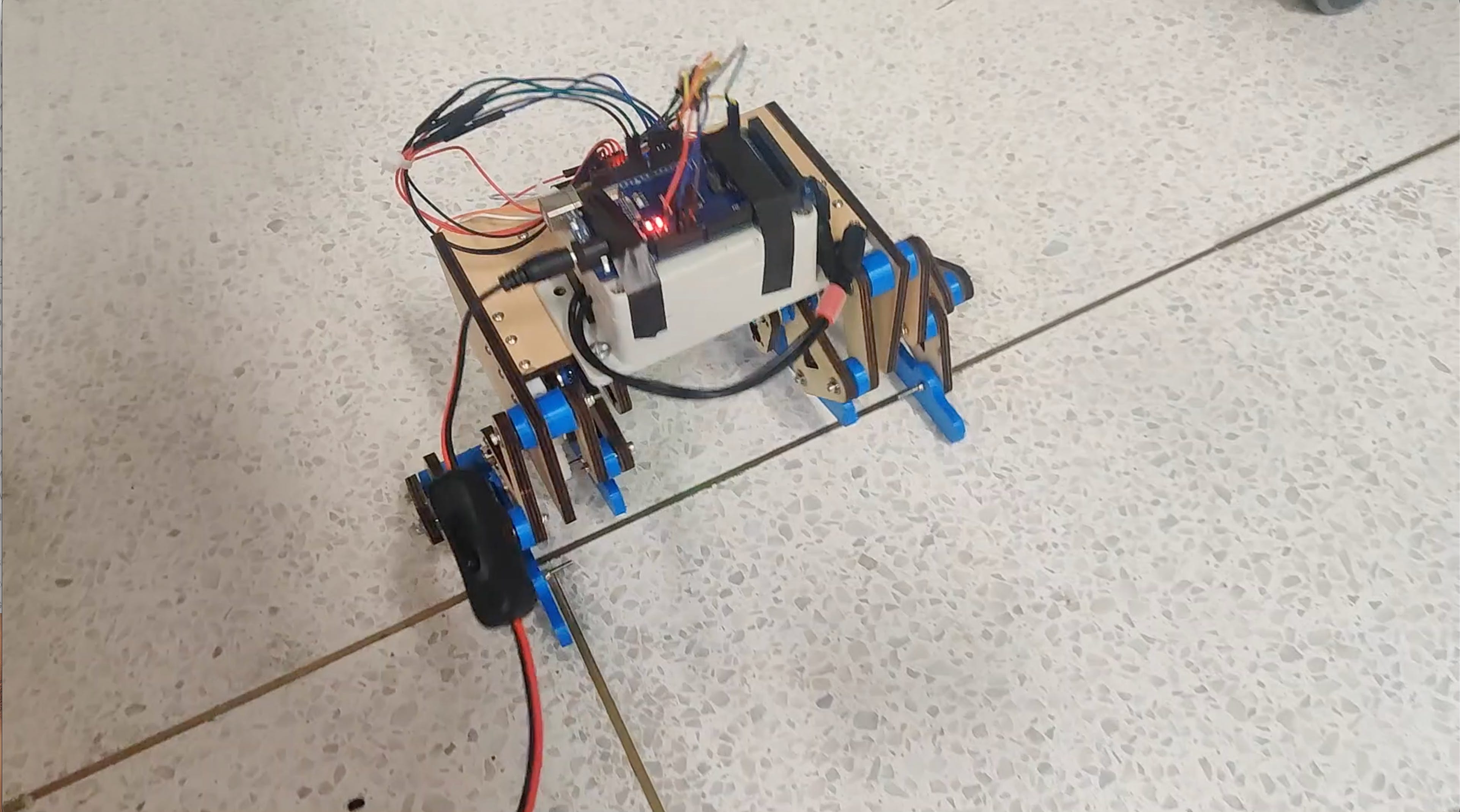
Robot Walker with Four Legs and Two Actuators
Prototype Reduced Complexity Drive and Control System

This Robot Walker results from a collaboration that started in Summer 2022, and continues into 2023. The UCInspire program (https://sites.uci.edu/ucinspire/) connected me and my student Jiaji Li with Chenhao Liu at Southern University of Science and Technology in Sichuan, China, also known as SUSTech. This four legged walker has two actuators, one for each side, which are position controlled to perform full movement, forward, backwards, and turning right and left. It is a very nice prototype with great opportunities for further work.
Please see Mechanical Design 101: A Walking Robot